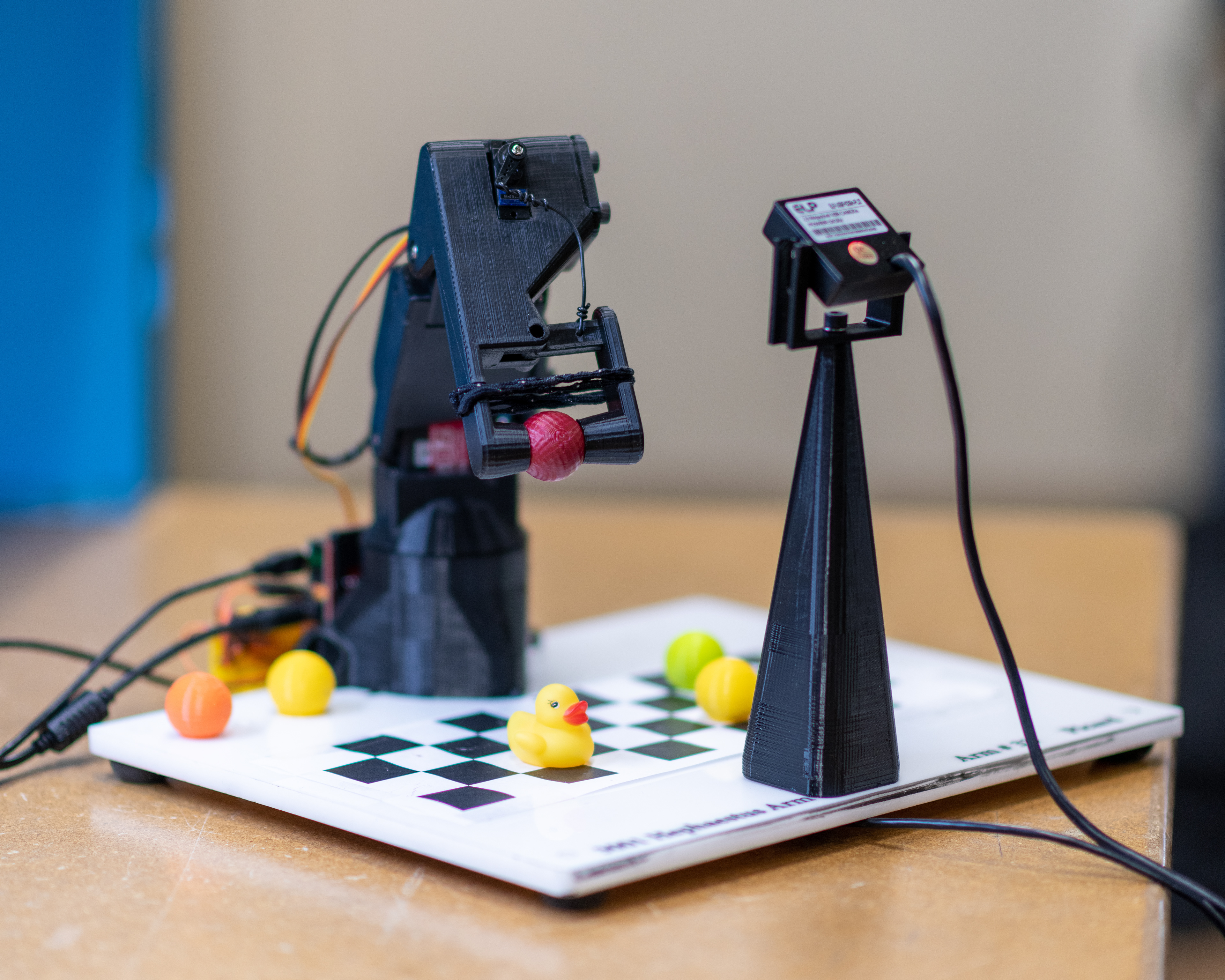
RBE 3001 is a class dedicated to learning how to control a serial 3-Degree-of-Freedom robotic arm to implement an automated pick-and-place system for organizing differently-colored spheres. This was done through MATLAB, utilizing computer vision toolboxes.
Through the class, I learned how to calculate the forward and inverse kinematics of the 3-DOF arm to translate between the robot's task and joint spaces, as well as perform trajectory planning for paths in the robot's task space, and velocity kinematics to minimize unwanted acceleration. After creating this functionality for this arm, the pick-and-place system was developed, which used the computer vision functionality built into MATLAB.
The final system picked up and sorted the differently-colored spheres successfully, and worked in a way to allow more spheres to be added or removed dynamically.